


| Параметр |
Ед
|
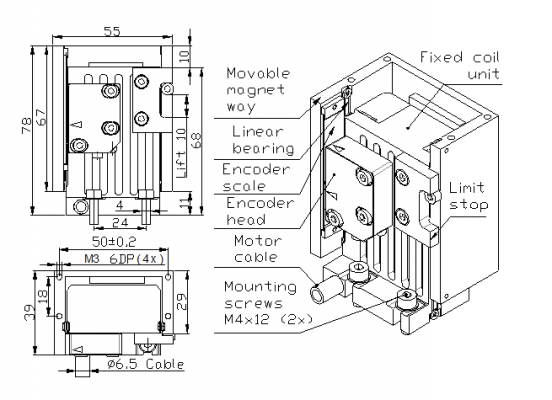
LT26-65-25-HS1-KF-RA-10-N-N0-Z
|
LT26-65-50-HS1-KF-RA-10-N-N0-Z
|
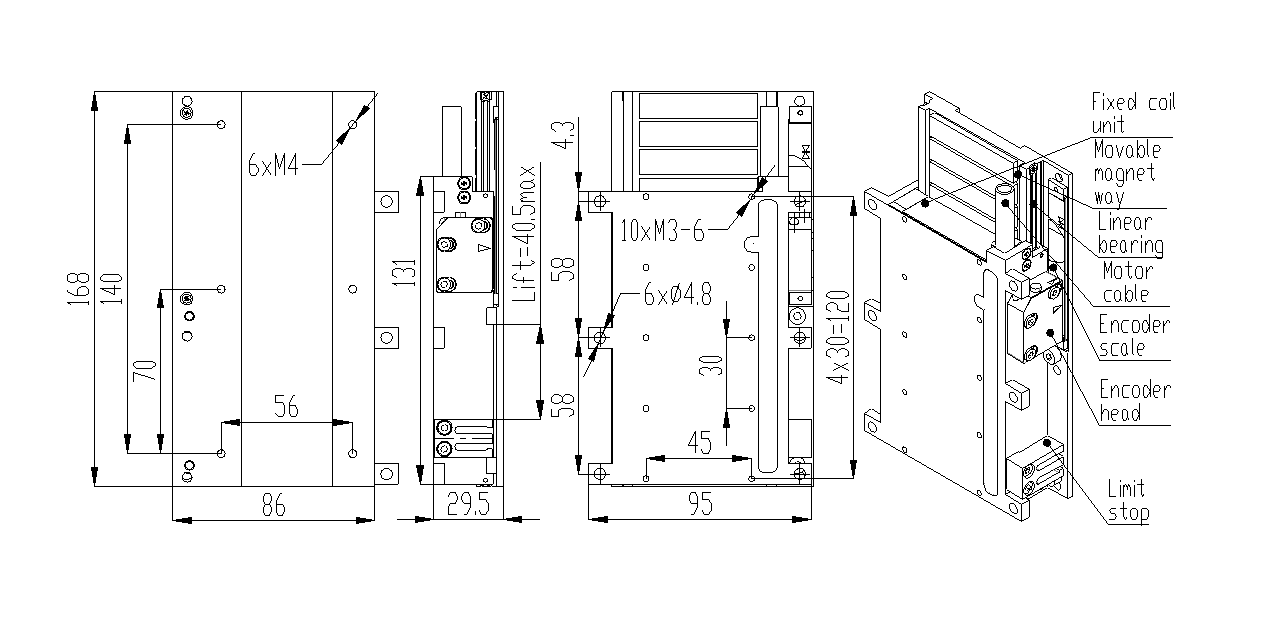
LT24-125-30-GS1-KF-RA-40-N-N0-Z
|
LT24-125-50-GS1-KF-RA-40-N-N0-Z
|
| Длина пары полюсов 2P |
мм |
26 |
26
|
24
|
24
|
| Пиковое / длительное усилие Fp / Fa (ПВ 10% / 100%) |
Н |
63 / 21 |
126/42 |
130/48 |
216/90
|
| Трение в подшипнике Fb / Зубцовое усилие Fc |
Н |
3/2 |
4/3 |
2/2 |
3/3
|
| Пиковый / Длительный ток при Fp / Fa |
Аэфф |
6.6/2.2 |
6.6/2.2 |
9.3/3.8 |
9.3/3.8
|
| Индуктивность фаза-фаза L |
мГн |
4.5 |
8.5 |
1.1 |
2.6
|
| Сопротивление фаза-фаза R |
Ом |
4.5/2.2 |
4.3 |
1.2 |
1.9
|
| Максимальная скорость Vp / Va при U= 150 VDC и Fp / Fa |
м/с |
1.4/1.4 |
1.5/1.5 |
4.0/4.0 |
4.5/4.5
|
| Max. acceleration |
m/s2 |
220 |
340 |
400 |
530
|
| Вес оси / подвижной части (для хода 10 мм, как на чертеже) |
кг |
0,72 / 0,27 |
0,72 / 0,27 |
0,72 / 0,27 |
1.5/0.4
|
| Максимальный вес нагрузки |
кг |
2,7 |
2,7 |
2,7 |
5.0
|
| Прямолинейность |
мм |
0,02 |
0,02 |
0,02 |
0.04
|
| Период синусного энкодера |
мм |
2 |
2 |
2 |
2
|
| Точность / Повторяемость / Разрешение |
мм |
0,05 / 0,005 / 0,001 |
0,05 / 0,005 / 0,001 |
0,05 / 0,005 / 0,001 |
0,05 / 0,005 / 0,001
|
Промышленная автоматизация.